
Artist Statement
The natural world is a thing of beauty. The way that plants grow, bees roam around collecting nectar, rain splashes into a puddle and the other endless intricacies of life. Artists get inspiration from all of these experiences to make art. Every artist has a medium to express them selves. Some have embraced electronics and welcomed technology in the creative process. The vast diversity of pre-fabricated electronics has given way to the hacking of these systems to re-invent the purpose of a machine. Artists use these modified machines as tools for the creation of art. Modifications range from the attachment of markers or pencils to toys that move around a surfaces, to the mounting of paintbrushes to robotic arms that then paint an image. The re-appropriation of technology to create art is only limited by imagination.
 Jackoon Image |
 Artist's Edition |

What is Art Robotica?
Art generated by the collaboration of autonomous painting machines and artists.
Art Bots are autonomous machines that paint or draw on a canvas, sheet of paper or a surface of some kind. Systems that utilizes this concept are currently used widely to create generative or algorithmic art. Some Art Bots that were created, walk around the surface of a canvas and paint a composition predetermined by the image or video they use as reference.
At first glance it seems that the Art Bots are painting a random pattern. As time passes by and they lay more paint down, it will be apparent that they are making a figurative painting. The artist can then making additions to the work to encapsulate an ideology or to improve the composition. The work that results from this collaboration is Art Robotica.
The raise in technology, Do It Yourself (DIY) information and open source projects has laid down a path for artist to create machines that can assist in the art making process. The symbiotic relationship between the robot and human is very apparent in the scientific and manufacturing fields. Scientists use robots for things like DNA research, exploration of underwater environments and outer space. They are beginning to be deployed in the military, as well as, showing up in retail stores as toys. Robots are now beginning to filter into the art world as tools to make art. Systems that utilize the robot as a tool are currently used widely to create generative or algorithmic art. The new generation of Artbots are seen as collaborators and not just tools. This shift in philosophy is what gave birth to the term "Art Robotica."
Art Robotica Methods
Jackoon Painting from Oscar G. Torres on Vimeo.
The Artbots created for this project, will travel around the surface of a canvas and create a composition that uses images or video as reference. At first glance it will seem that they are painting a random pattern. As time passes by and they lay more paint down, it will be apparent that they are making a figurative painting. An artist will be making additions to the work since the goal of the final piece to encapsulate the ideology of the composition in human terms.
The ArtBots will communicate with a central computer that serves as the robots' eyes. The computer analyses video feeds from two sources; one video feed or image with data of the subject to be painted and a second camera that tracks the current position of the robot.
Illustration of video feeds:
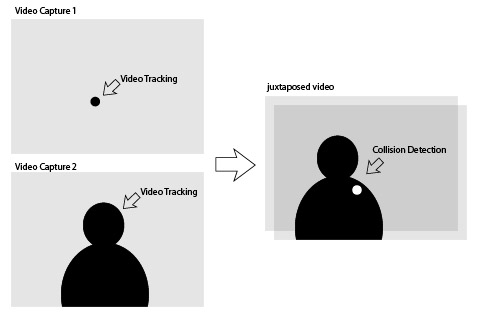
Through the use of Processing for software development and Arduino for hardware control, an application was written to juxtapose the two video feeds which also use pixel analysis and collision detection to tell the robot when it needs to paint. Each ArtBot will have a unique ID and XBee Radios whish will be used to communicate with the central computer. The ArtBots will be assigned a specific range of the color spectrum. Since the computer can identify each unique robot and the color spectrum is pretty large, the number of robots that can be used for a composition is limited only by the space they have available to paint. The process of making a painting is very unique and entertaining, which lends itself to be viewed as a performance.
Sample set-up:

Sample set-up:

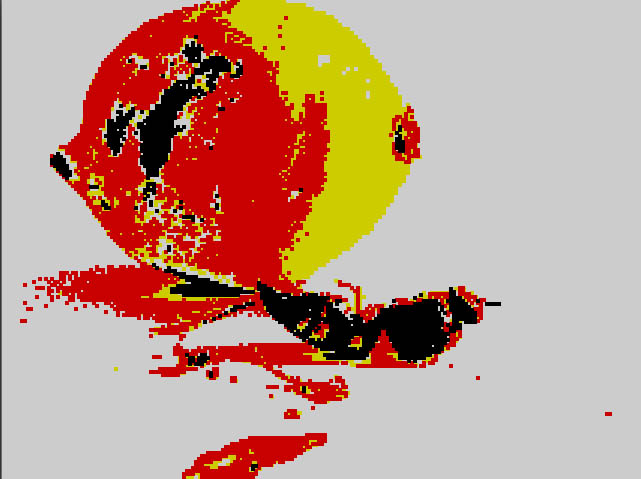
The system design uses and image or a video feed from a subject, which a computer analyses and breaks down the image to get all the color, brightness and relevant pixel information.
Original image:

The image the computer sees consists of blobs of color. Each one of these color blobs is assigned to a robot with a bucket corresponding to that color. If only one robot is available then the robot can take turns painting layers of colors.
Computer Vision:
Once the robot(s) is(are) done painting the image. The resulting painting will vary in detail depending on the sensitivity variables programmed into the robot. At this point the artist can decide what to paint on the canvas if anything needs to be painted at all.
Robotic composition:

The editions made by the artist are dependant on what the artist believes the final piece should convey. The editions can reinforce the representation of the original subject or it can take a completely new direction.

Robot Making Process:
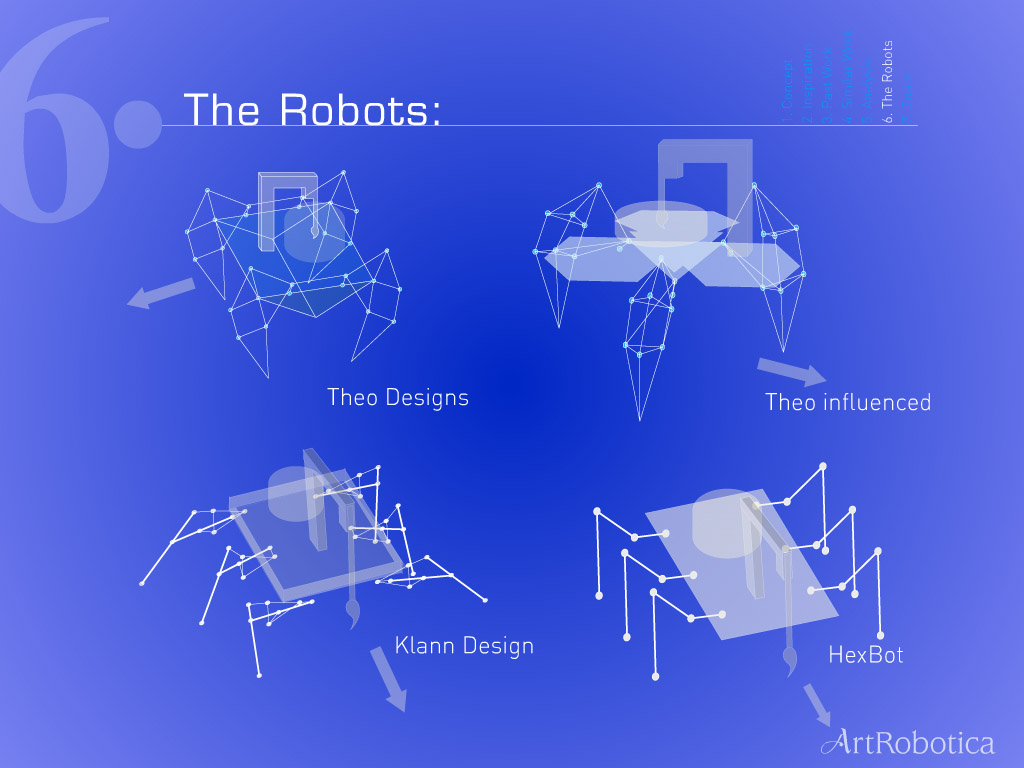
In concept the ArtBots will be look and move very organically. They have the capability of using sensors that will allow them to react to their environment and be subjected to influence by their surroundings. Each individual robot will have a personality and a painting style that will be unique to its design. ArtBots can be built to function in any imaginable way, some of the concept designs include:
Spidy concept rendering:

A six-legged spider-like bot that is very nervous and jumpy. Spidy moves very cautiously but can burst into a frantic, alert state when it is startled.
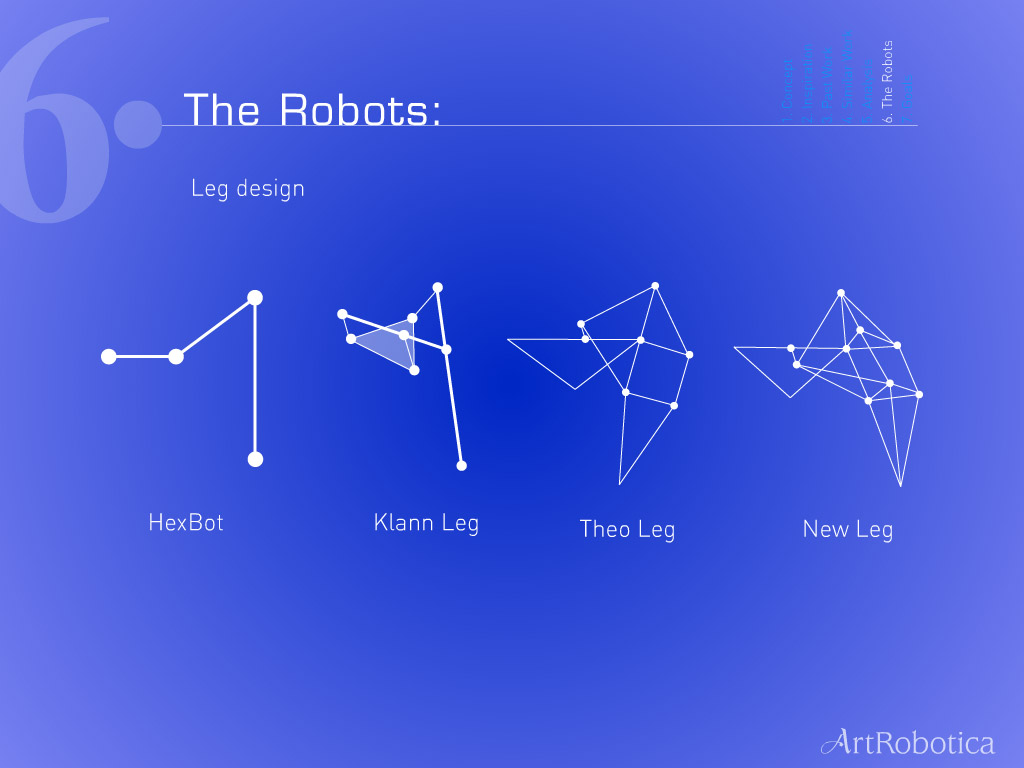
Robot control systems can be as simple as controlling wheel movement back and forth or as complicated as using geometry, kinematics, statistics and dynamics to calculate motion of limbs. To make a robot with legs that are able to balance the mechanism, a system that uses compound transformation equations, spatial descriptions, rotation representations, Euler mathematics and Jacobian matrix analysis is needed to calculate the movements, reactions, error correction and fluid motion of the robots. If building your own robots it is important to consider the singularity of the kinematics, which means that the limb of the robot cannot move any more due to its finite length. In order to mathematically be able to compute the delta of the alpha and beta states of the robotic arms, all the later calculations need to be conducted. Since most often the microcontrollers that will be used to make such robots have very little memory and processing power, the capability to create robots that can conduct higher level calculations will require a custom microcontroller or small computer to meet the requirements.
Spidy prototype:

Spidy uses 18 servo motors to move the legs and 2 servo motors for the robotic arm. Pololu servo controllers where used along with an Arduino microcontroller and an Xbee Radio for the wireless communication with the computer.

An alternative to engineering the transport system of a robot, hacking into a pre-existing mechanism is an option. There are many toys and walking machines available in the market that lend them selves to serve as the mobile system of a robot. These systems can be enhanced to include the ability to follow instructions from a central computer and to paint with a paintbrush.
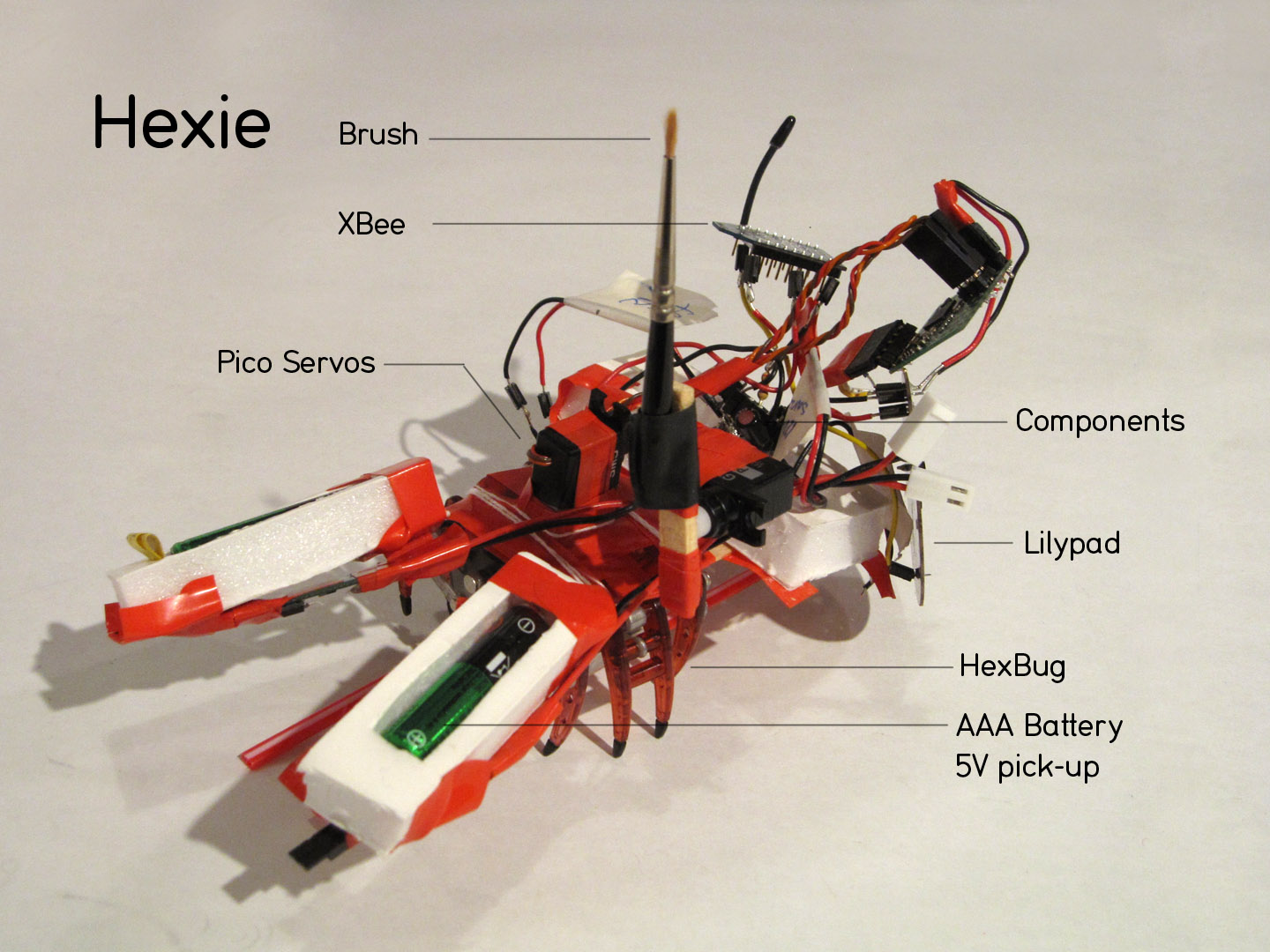
Hexie is an ArtBot that was built on top of a toy called the HexBug. These little toys are available at electronic retail stores or online for a very affordable price. The little robots come pre-programmed to react to their environment. These bots are a good way to speed up the fabrication process since all that is needed is a robotic arm that can talk to a central computer so that the robot will paint in a specific location dictated by the central computer.
 <
<
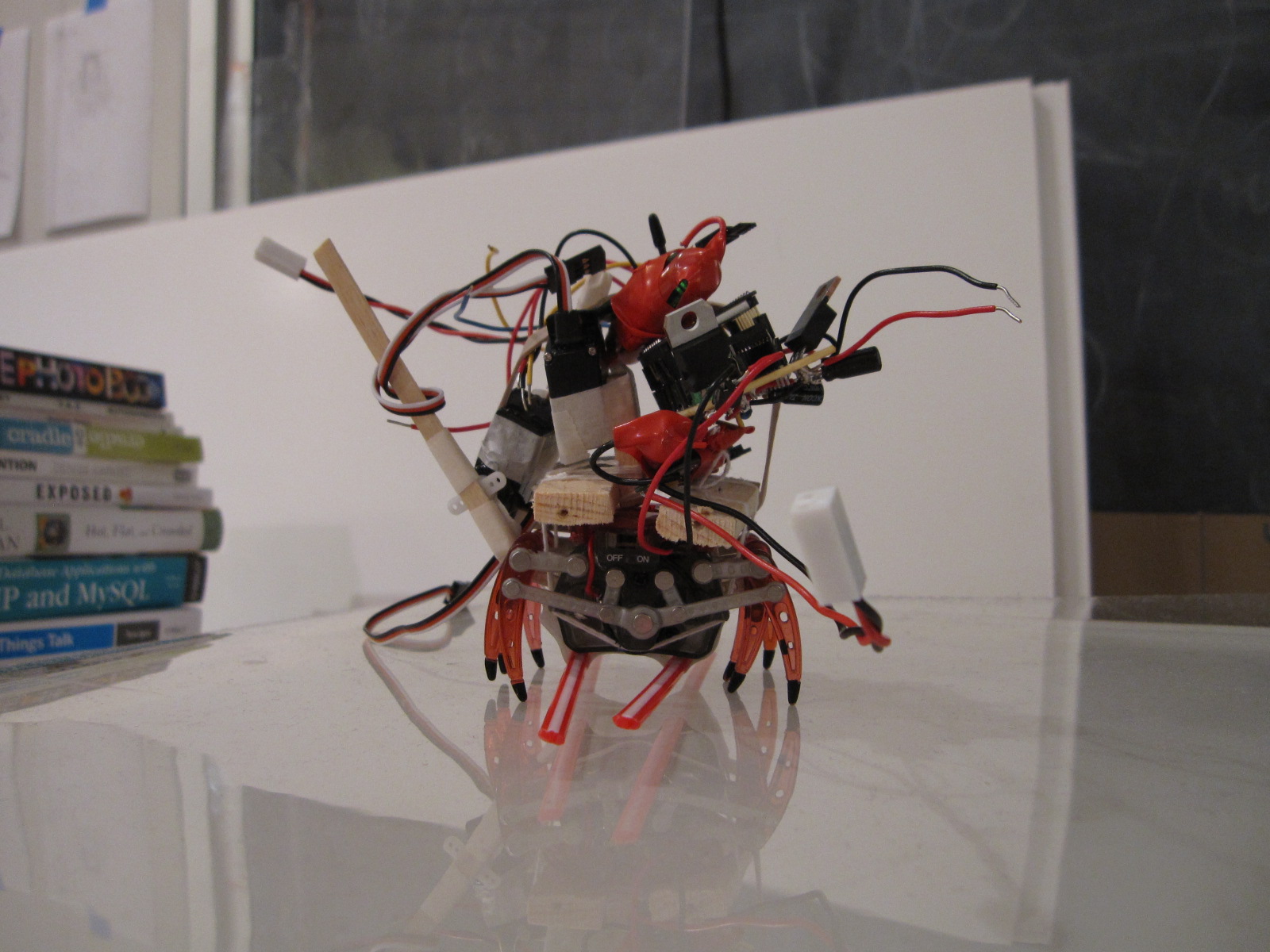
Hexie's components include a circuit that takes electricity from four double "A" batteries (4 x AA) or two AAA batteries with a 5V pick up circuit. The HexBug is then equipped with an Arduino Lilypad, a Pololu servo controller, Two pico servo motors, an XBee radio, a paint brush and a paint bucket. The weight of all the components is crucial to the function of the hacked HexBug. Too much weight will disable the robot’s ability to walk. Initial tests where conducted to make sure that the little robot would be able to carry its payload.
Hexie with payload:
Different robots could be made to assist artist paint. All the robots can be constructed differently to allow for a variation in painting style and motion.
Leg Designs:
Robot Design:
Hacked Toys:
HexBug:
Bump and Go, toy taxi cab:

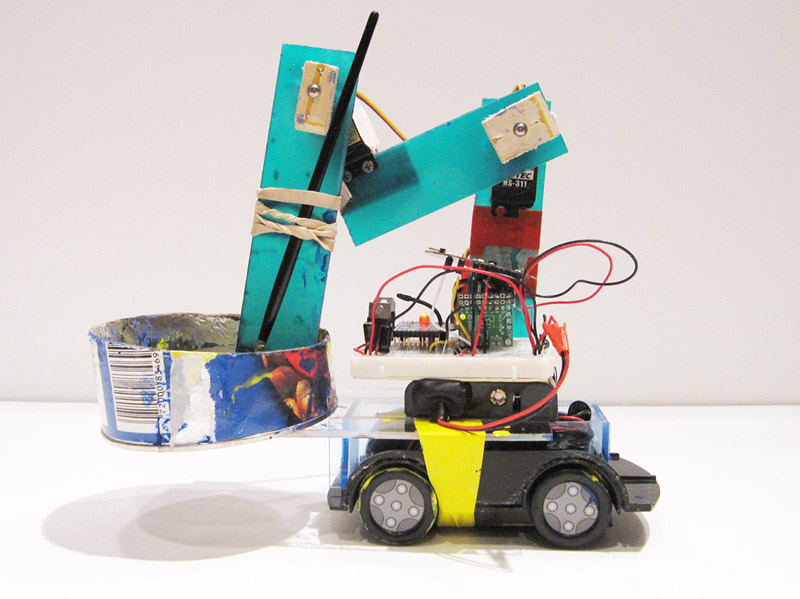
This is a toy that became popular due to its ability to change direction when it collides against an obstacle in its path. I took the toy apart and used the mobile system to carry a painting arm around a canvas. The resulting painting machine became known as Jackoon the painting machine. The reason I named it Jackoon is due to the fact that Jackoon initial painting style was to splash paint all over a canvas, even though Jackoon was getting data to the exact place to paint, the action filled gestural way that Jackoon painted abstracted the composition.
Jackoon the painting machine:
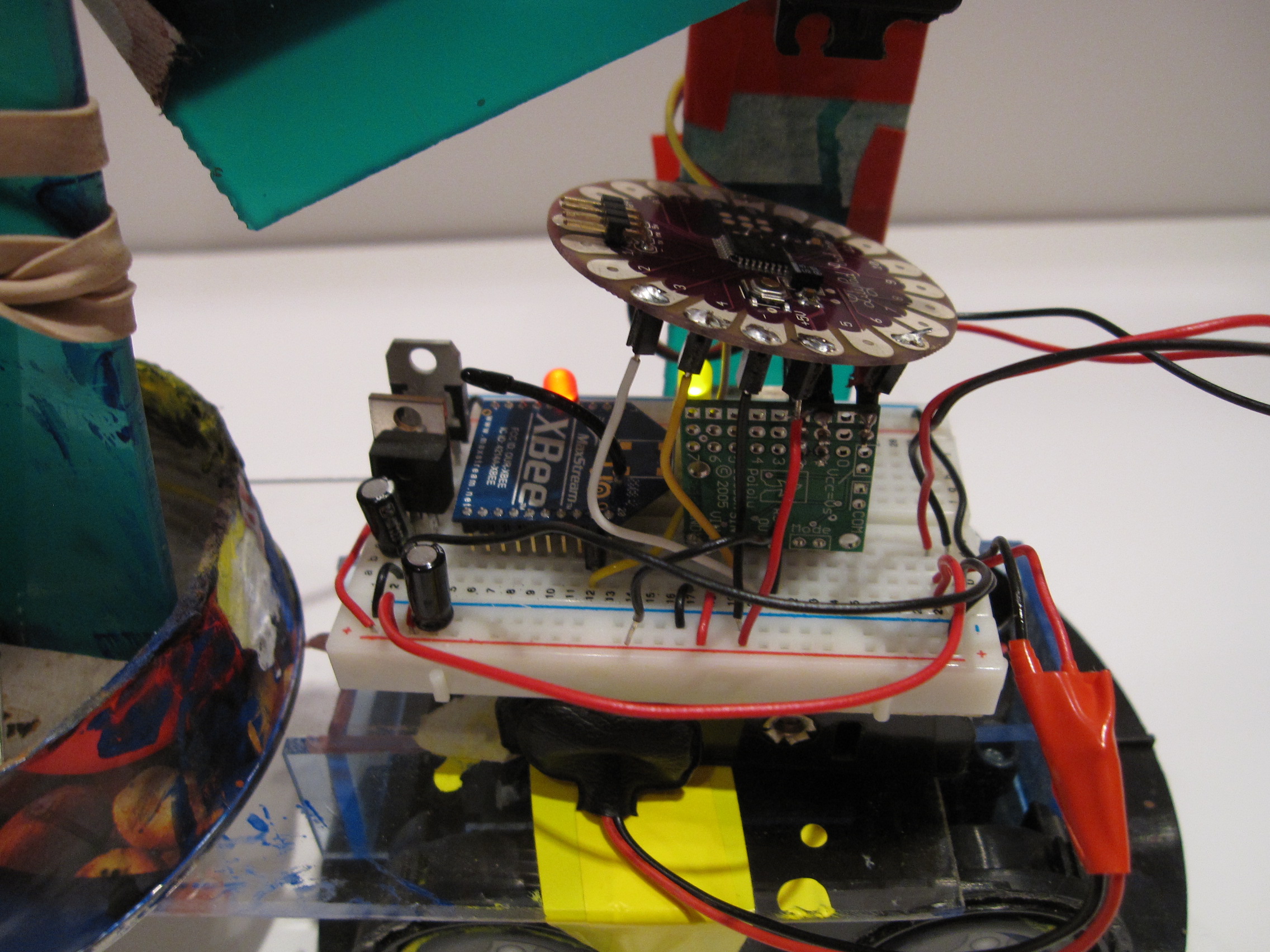
Jackoon was equipped with the same components as Hexie which include an Arduino Lilypad (for a lighter payload,) a Pololu servo controller, two servos for the arm, an XBee radio, a paintbrush and a paint bucket for the paint.
Close up of Jackoon's circuit:
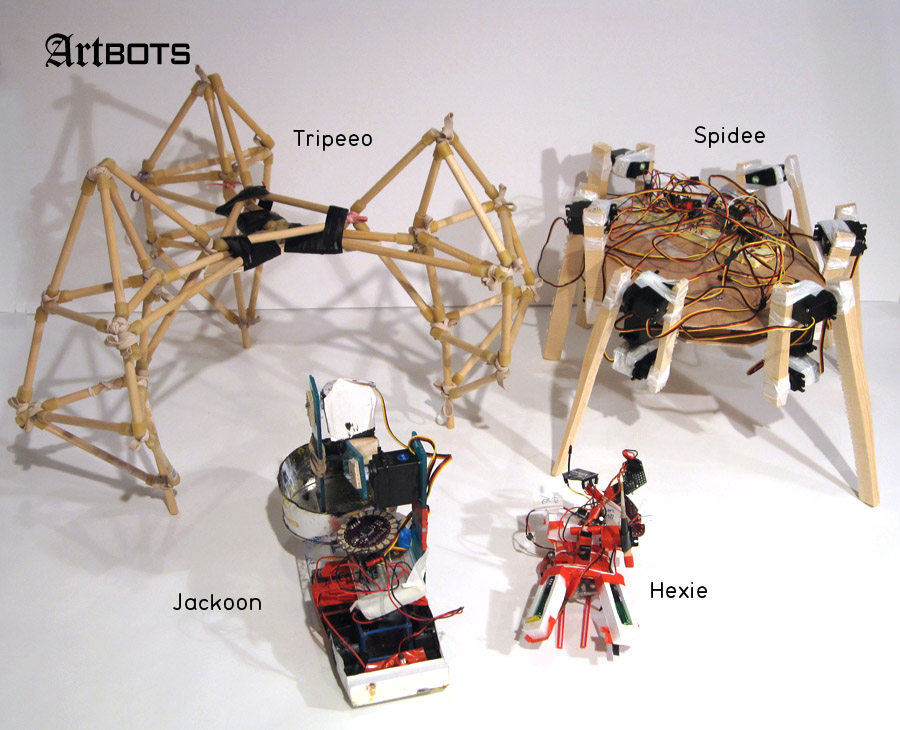
With the given amount of time, two functional prototypes and two prototypes in testing stages where produced along with a variety of circuits that function for some ArtBpts but did not work for others due to a variety of variables.
Resulting Prototypes:
Code:
&bull Processing Code
&bull or download zip file
&bull Broadcasting Xbee-Arduino Code
&bull Jackoon Arduino Code
For more information on the ArtBots visit my Blog.